|
|
|
|
Department of Mechanical, Nuclear and Production Engineering |
|
|
Development of automated systems for manipulation and quality control of natural leather plies (co-funded by Foundation Cassa di Risparmio di Pisa) |
|

![]()
![]()
![]()
![]()

| ||||||
|
|
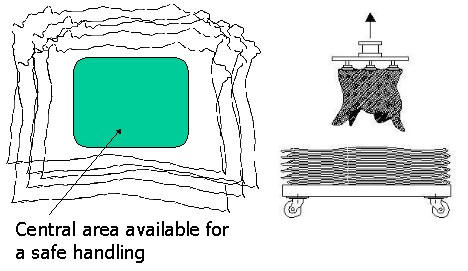
The development of appropriate suction cups does not solve all the difficulties. In particular, two types of grasping device can be proposed both characterized by particular effects.
If only a central area of the ply at the top of the stack is involved in grasping, only that ply is separated and grasped, but the planarity of the ply is compromised and its positioning on a planar surface is not possible due to the creation of multiple folds which avoid a correct spreading of the ply. The vacuum cups configuration is quite simple, because there is the need to grasp the leather plies by acting only in their central area. So there are few suction cups mounted on a little square surface and there is no need to have a complex control system (vacuum degree sensors, cables, controller, etc.) to control the leather grasping on its whole surface.
In order to spread up the leather ply grasped with a small gripper, an innovative spreading device is under developing. It will be able to spread twice the leather throughout two perpendicular direction.
This device is patent pending.
|
Updated 2004/11/24 |