|
|
|
|
Department of Mechanical, Nuclear and Production Engineering |
|
|
Development of automated systems for manipulation and quality control of natural leather plies (co-funded by Foundation Cassa di Risparmio di Pisa) |
|

![]()
![]()
![]()
![]()

| ||||||
|
|
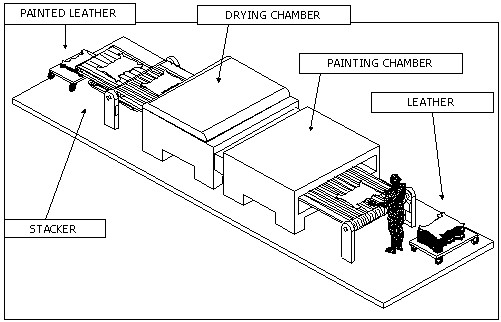
The leather manufacturing is traditionally a craft procedure and the introduction of the automation meets a strong resistance. Only single semi-automatic machines, able to perform specific operations on a single ply, are commonly used. In this scenario, some points of interest where automation could be conveniently implemented can be identified, especially in loading and unloading of finishing machines, where the operations to be performed are quite simple, but repetitive, tedious and dangerous for the human health. A meaningful example is the loading and unloading operations of painting machines, which refine the leather plies at the end of the transformation process.
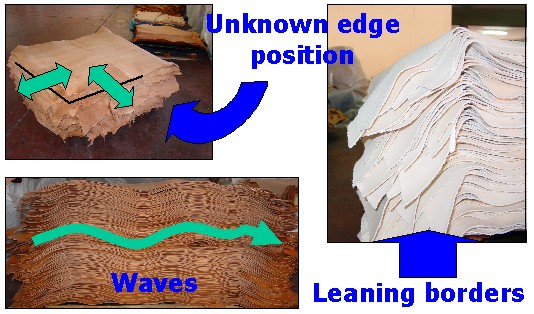
In tanning industry, a partial solution to the problem of automating ply handling has been developed: special mobile devices at the end of the conveyor belts, named "stackers", are able to pile the leather plies up, but such devices are not usable to perform the separation of a single ply from the stack and loading it on a machine. Many problems have to be faced in order to completely automate the manipulation of leather plies. These problems are typically encountered when non-rigid parts have to be grasped and positioned. Different physical principles have been used in literature to solve the problem of grasping these parts: suction grippers, air flow generating a controlled suction pressure without any contact between gripper and object, iced layer, special grippers using glue, velcro, needles and carden. Unfortunately, almost all these solutions generate unacceptable damages on the valuable leather surface. In the field of leather handling, the problems related to automated grasping, stacking and ply separation are strictly connected. This is due to different factors:
The former factor forces the producers to store the leather plies in stacks. The latter makes the separation of the plies very difficult: no edge with an a-priori known position is available for grasping and no area where the entire ply surface is surely found can be detected.
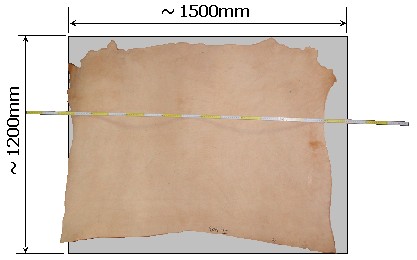
Another problem concerns the adhesion of the vacuum cup to the leather surface. Its roughness together with its flexibility create severe difficulties in grasping stability, and a high vacuum level should be adopted for assuring stable and reliable manipulation. On the other hand, using a high vacuum level, standard cups often generates permanent and unacceptable imprints on the leather surface, leading to the rejection of the entire ply. For this reason, new materials and new shapes of cups should be experimented.
For the previous reasons, simple and reliable devices able to automate the loading and unloading operations of finishing machines are strongly needed. Therefore, the following objectives have been pursued in this research program: customized vacuum cup: by developing a new vacuum cup for the grasping of leather plies; automated extended and central grasping: performed by a special gripper including a set of customized vacuum cups properly disposed; All these devices are patent pending.
|
Updated 2004/11/24 |